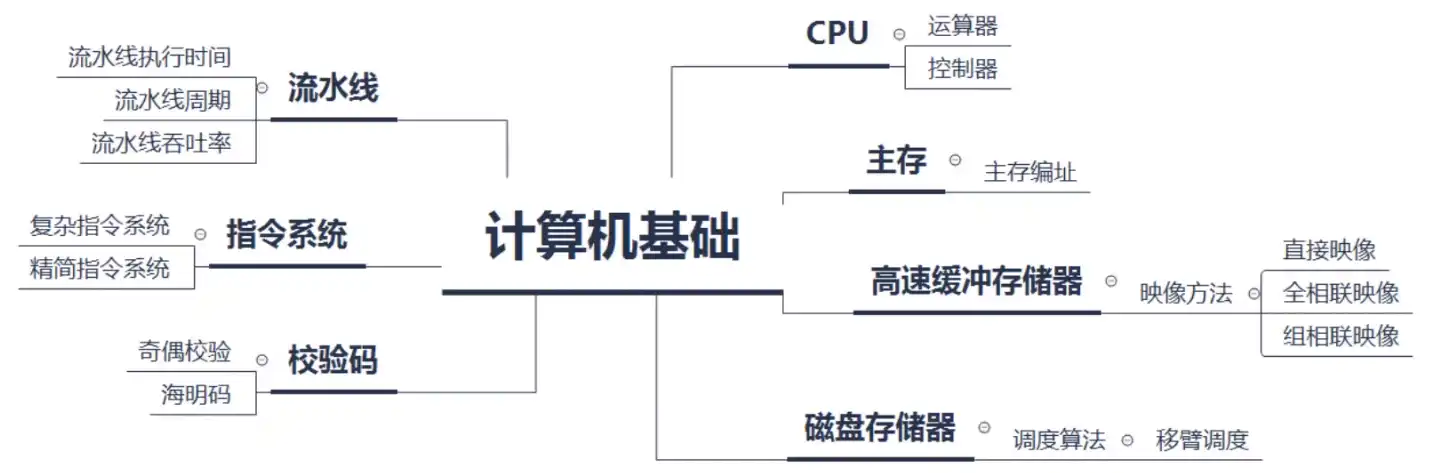
章节知识架构图
一 CPU
现代计算机硬件图

运算器
① 算术逻辑单元(ALU):数据的算术运算和逻辑运算
② 累加寄存器(AC):通用寄存器,为 ③ ALU 提供一个工作区,用来暂存数据
④ 数据缓冲寄存器(DR):写内存时,暂存指令或数据
⑤ 状态条件寄存器(PSW):存状态标志与控制标志
控制器
① 程序计数器(PC):存储下一条要执行指令的地址
② 指令库寄存器(IR):存储即将执行的指令
③ 指令译码器(ID):对指令中的操作码字段进行分析解释
④ 地址寄存器(AR):用来保存当前 CPU 所访问的内存单元的地址
⑤ 时序部件:提供时序控制信号
真题示例 - 2.1:
CPU 执行算术运算或者逻辑运算时,常将源操作数和结果暂存在()中。
A. 程序计数器(PC) B. 累加器(AC)
C. 指令寄存器(IR) D. 状态寄存器(PSW)
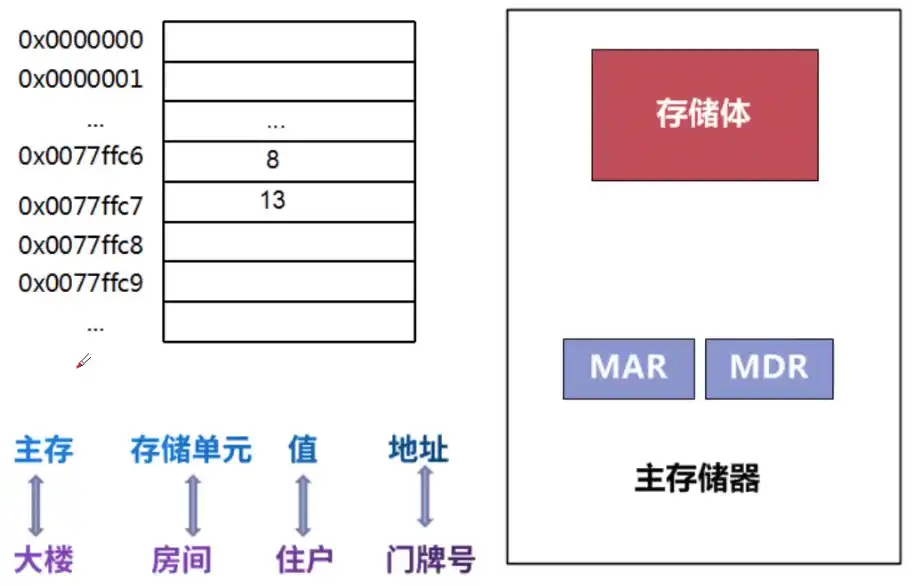
三 主存
存储器的基本单位是存储单元,一般以 8 位二进制为一个存储单元。每个存储单元都有一个地址,一般用十六进制数表示。

真题示例 - 3.1
内存按字节编址,地址从 A0000H 到 CFFFFH 的内存,共有()字节,若用存储容量为 64K × 8bit 的存储器芯片构成该内存空间,至少需要()片。
A. 80K B. 96K C. 160K D. 192K
A. 2 B. 3 C. 5 D. 8
四 存储器

4.1 Cache(高速缓冲存储器)
作用:解决 CPU 和主存之间的速度差异,避免 CPU “空等” 现象。

Cache 的映像方法
① 直接映像
直接映像方式的优点是地址变换很简单,缺点是不灵活,块冲突率高。

② 全相联映像
全相联映像位置不受限制,十分灵活。其主要缺点是无法从主存块号中直接获得 Cache 的块号,变换比较复杂,速度比较慢。

③ 组相联映像 (注:非考点内容)

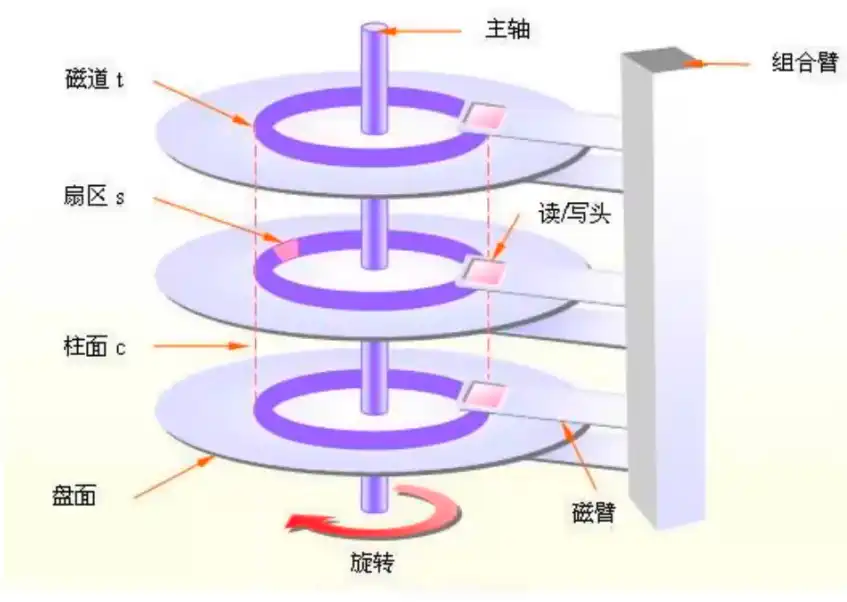
4.2 磁盘存储器
常用的外存有磁带存储器、硬盘存储器、磁盘阵列和光盘存储器。
磁盘存取时间:
$寻道时间 + 等待时间 + 读/写时间$
其中读/写时间可忽略不计,
$平均寻道时间 + 平均等待时间$
真题示例 - 4.1:
在磁盘调度管理中,应先进行移臂调度,再进行旋转调度。假设磁盘移动臂位于 21 号柱面上,进程的请求序列如下表所示。如果采用最短移臂调度算法,那么系统的响应序列应为()。

A. ②⑧③④⑤①⑦⑥⑨ B. ②③⑧④⑥⑨①⑤⑦
C. ①②③④⑤⑥⑦⑧⑨ D. ②⑧③⑤⑦①④⑥⑨
五 校验码
5.1 奇偶校验码
保持 1 的个数为奇数/偶数。只能发现奇数个位出错的情况。
00100011 偶校验:100100011 奇校验:000100011
以偶校验为例: 假设 100100011 有一位出错 → 100100010 假设 100100011 有两位出错 → 100100000
5.2 海明码
海明码是建立在奇偶校验码基础上的。海明码的校验码的位置必须是在 $2^n$ 位置(n 从 0 开始,分别代表从右边数起分别是第 1、2、4、8、16 ……),信息码也就是在非 $2^n$ 位置。

设数据位是 n 位,校验位是 k 位,则 n 和 k 必须满足以下关系:
$$ \bf \textcolor{red}{2^k - 1 \geq n + k} $$真题示例 - 5.1:
海明码是一种纠错码,其方法是为需要校验的数据位增加若干校验位,使得校验位的值决定于某些被校位的数据,当被校数据出错时,可根据校验位的值得变化找到出错位,从而纠正错误。对于 32 位的数据,至少需要加()个校验位才能构成海明码。
A. 3 B. 4 C. 5 D. 6
六 指令系统
| 名称 | 指令要求 | 寻址方式 | 实现方式 | 编译 |
|---|---|---|---|---|
| 复杂指令系统 CISC | 指令数量众多,使用频率相差悬殊。可变长指令格式。 | 多种寻址方式 | 与主存直接交互。微程序控制 | 编译复杂 |
| 精简指令系统 RISC | 指令数量少,长度固定 | 寻址方式少 | 硬布线逻辑控制。流水线技术。与寄存器交互 | 优化的编译器 |
七 流水线
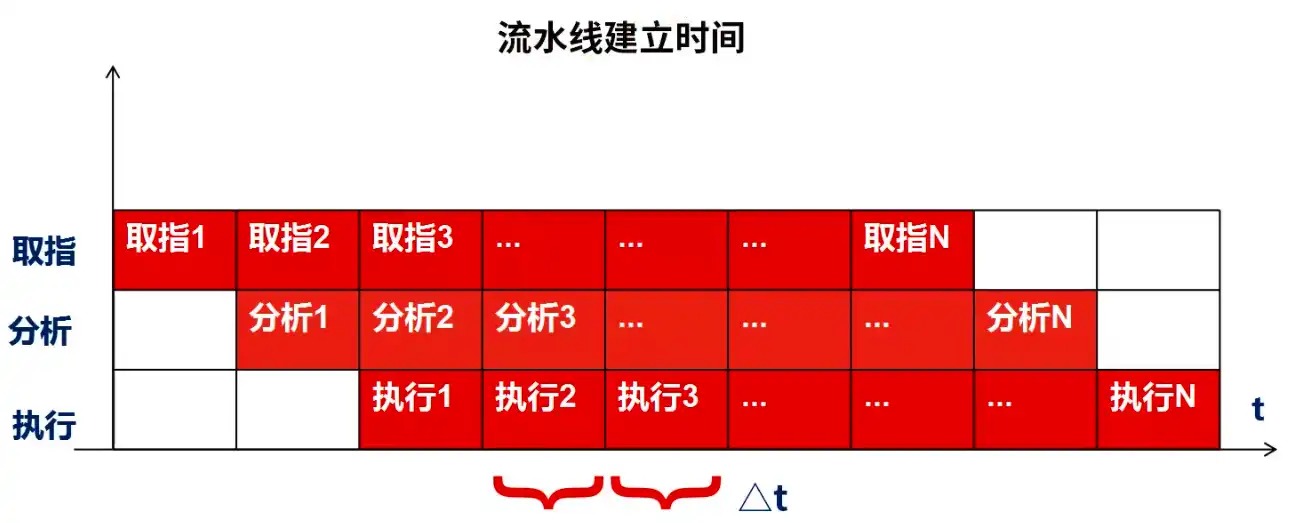
7.1 流水线周期
流水线周期:执行时间最长的一段
7.2 流水线执行时间公式
$$\bf \textcolor{red}{(t1+t2+ \cdots +tk)+(n-1) \times \Delta t}$$例题:若流水线把一条指令分为取指、分析和执行三个部分,三部分的时间分别是取指 2ns,分析 2ns,执行 1ns。那么流水线周期是多少?100 条指令全部执行完毕需要的时间是多少?
7.3 流水线的吞吐率和最大吞吐率
吞吐率是指单位时间内流水线处理机流出的结果数。对指令而言,就是单位时间内执行的指令数。
$$TP = \frac{指令条数}{流水线执行时间}$$ $${TP}_{max} = \lim_{n \to \infty} \frac{n}{(k+n-1)\Delta t} = \textcolor{red}{\frac{1}{\Delta t}}$$真题示例 - 7.1:
执行指令时,将每一节指令部分分解为:取指、分析和执行三步,已知取指令时间 $t_{取指} =5 \Delta t$,分析时间 $t_{分析} = 2 \Delta t$,执行时间 $t_{分析}=3 \Delta t$,如果按照 [执行]k,分析 k+1、取指 k+2 重叠的流水线方式执行指令,从头到尾执行完 500 条指令需()$\Delta t$。
A. 2500 B. 2505 C. 2510 D. 2515
八 系统可靠度分析
8.1 串联系统
假设一个系统由 n 个子系统组成,当且仅当所有的子系统都能正常工作时,系统才能正常工作,这种系统称为串联系统。

如果系统的各个子系统的可靠度分别用 $R_1, R_2, \cdots, R_n$ 表示,则系统的可靠度为:
$$\textcolor{red}{R = R_1 \times R_2 \times \cdots \times R_n}$$8.2 并联系统

可靠度:
$$\textcolor{red}{R = 1 - (1 - R_1) \times (1 - R_2) \times \cdots \times (1 - R_n)}$$真题示例 - 8.1:
某系统由 3 个部件组成,每个部件的千小时可靠度都为 R,该系统的千小时可靠度为 $(1-(1-R)^2)R$,则该系统的构成方式是()。
A. 3 个部件串联
B. 3 个部件并联
C. 前两个部件并联后与第三个部件串联
D. 第一个部件与后两个部件并联构成的子系统串联
附录:真题答案
| 真题序号 | 答案 |
|---|---|
| 2.1 | B |
| 3.1 | D、B |
| 4.1 | D |
| 5.1 | D |
| 7.1 | B |
| 8.1 | C |


感谢您的耐心阅读!来选个表情,或者留个评论吧!